一、 概述
随着现代制造业的发展,采用力矩电机的AC轴得到越来越多的应用。针对AC轴中的A轴采用由两个完全相同的力矩电机驱动的方式,我们在电气控制上采用由一个伺服驱动器连接、驱动两个力矩电机的方法。同以往采用由两个伺服驱动器驱动的方法相比,它具有控制简便、降低成本、缩短调试周期等优点,并能保证A轴高速、高精度的定位要求。
二、 电气连接
在为某项目设计的A轴中,采用了两个完全相同的力矩电机并联布置的安装结构。
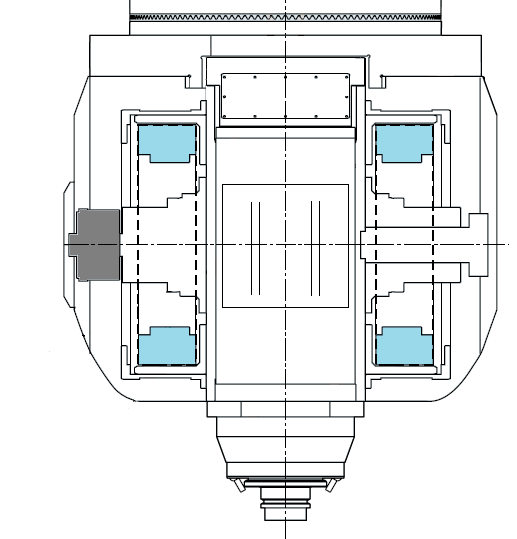
图1 A轴结构
针对这种结构,我们在电气连接上对两个力矩电机也采用并联连接、驱动的方式,即采用西门子S120驱动系统,使用一个伺服驱动器来驱动这两个力矩电机。主控制器选用的是西门子840Dsl数控系统。
由于A轴两个力矩电机的安装方式是并联安装,因此两个力矩电机的旋转方向不同。需将其中一个力矩电机的V相和W相进行交换连接,而U相保持不变。驱动器选型最大电流需要满足两个电机电流之和。
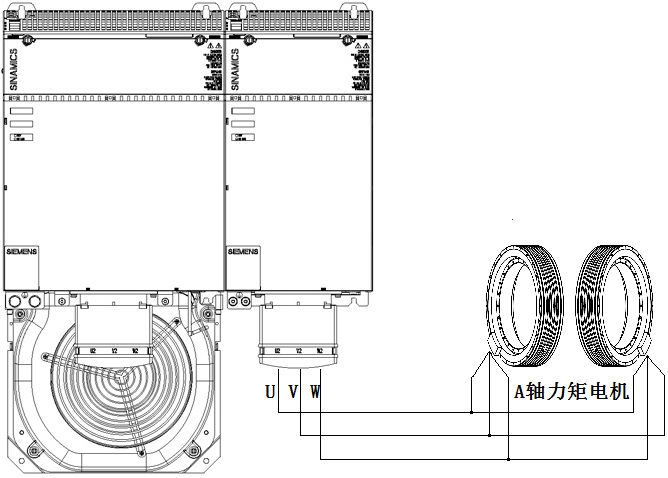
图2 S120驱动系统与A轴连接
当A轴的两个力矩电机并联布置时,必须检查各电机相位角情况。如果电气相位角不一致,由于感应电流的速度差异,会导致力矩电机的功率因数和转矩常数降低、噪声增大、过热、过载并触发驱动系统报警等一系列问题。
通过测出两个力矩电机的电气相位角,进而计算出机械安装角差值,通过调整转子或定子的机械安装角度来消除电气相位角偏差值。
电气相位差测量是两个同频率正弦电压的对应点间角度差值的测量。力矩电机的机械安装角、电气相位角及极对数有如下关系:
机械安装角=电气相位角/极对数
由于力矩电机的极对数是定值,根据电气相位角就可以算出机械安装角。两个电气相位角的偏差值应小于±5°,才能保证并联布置安装的两个力矩电机的静态功能。
电气相位差测量的方法如下:
1. A轴的两个力矩电机的机械安装完成;
2. 连接双通道示波器与力矩电机;

图3 双通道示波器与A轴力矩电机连接
3. 使A轴处于可以自由旋转的状态,通过外力旋转A轴,利用双通道示波器测量两个力矩电机的反向电压波形;
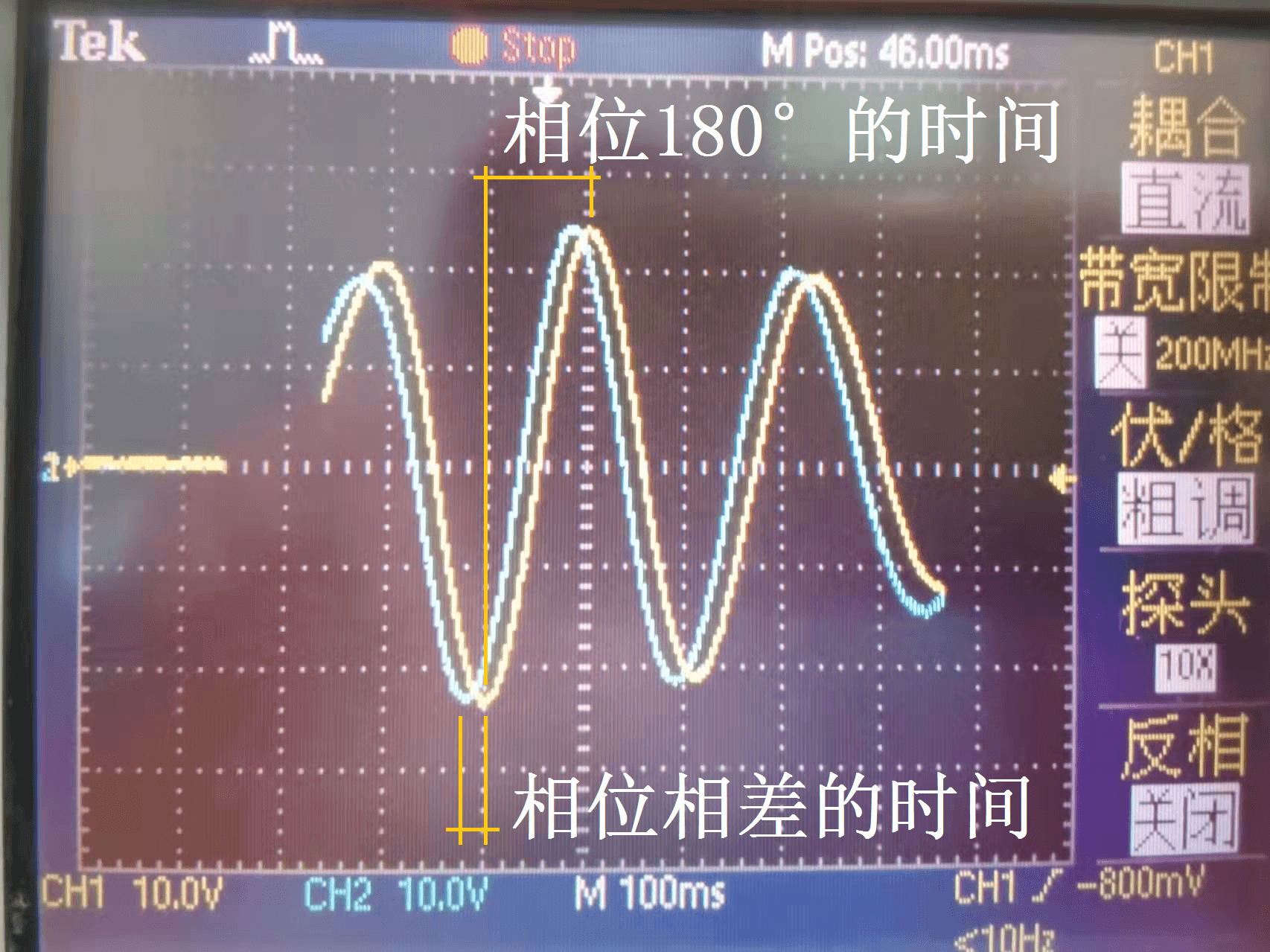
图4 示波器波形
4. 计算电气相位角的偏差值,公式如下:
5. 调整力矩电机的转子或定子的机械安装角度,再次进行电气相位差测量,直到它们之间的电气相位角偏差值小于±5°为止。
四、 参数设定
当硬件连接好并对系统初次送电以后,需要对S120驱动系统的电机驱动模块和电机等进行拓扑识别,配置参数。
由于两个力矩电机的电气连接采用并联连接,电流值(参数p305、p323、p338、p318)和转矩值(参数p312、p319)要在原有电机参数的基础上乘以2。同时,电机的电阻值(参数p350)和电感值(参数p356)要在原有电机参数的基础上除以2。
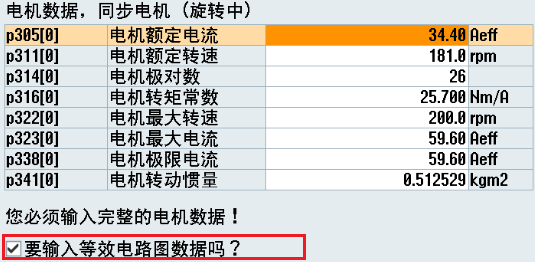
图5 电机数据
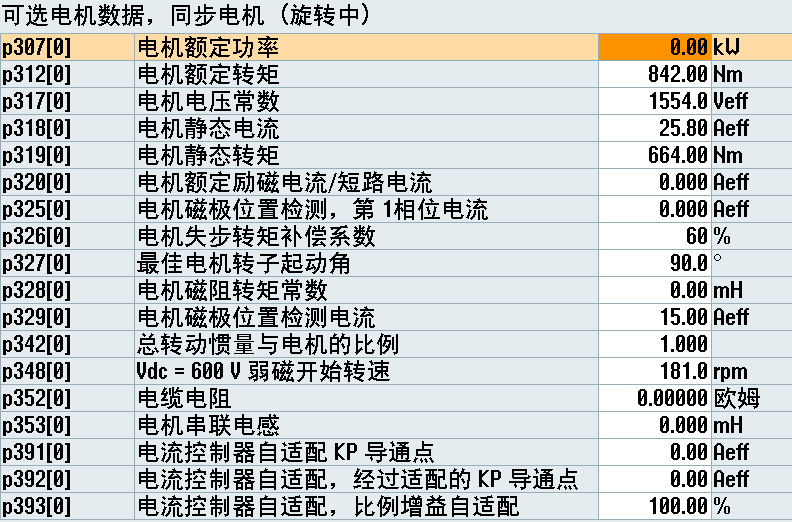
图6 可选电机数据
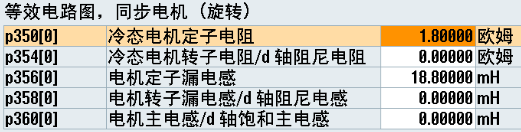
图7 配置电机电阻和电感
五、 调试
1. 磁极位置检测
配置完所有电机参数后,需要对力矩电机进行磁极位置检测。
磁极位置检测(PolID)功能,用于确定力矩电机的磁极位置,实现精确控制力矩电机,确保驱动系统的安全功能的无故障运行。
1) 按下“紧急停止”按钮,使驱动系统处于紧急停止状态;
2) 按电机最大电流(参数p323)的30%设置电机磁极位置识别电流 (参数p329)。
3) 设置p1980=1,选择磁极位置方法为饱和法,1次谐波;
4) 设置p1990 = 1,激活一次磁极位置检测并传送数据;
5) 松开“紧急停止”按钮后给驱动系统送脉冲使能,驱动系统自动执行磁极位置检测,并将测出的角度差(参数p1984)记录在参数p0431 中;
6) 检测完成后,参数p1990会自动变回0;
7) 保存参数。
2. 伺服优化
为了实现高速、高精度的定位、加工,消除噪音和震动,需要对S120驱动系统的电流环、速度环、位置环优化。
1) 电流环优化
由于采用第三方的力矩电机,因此首先要优化电流环。借助西门子840Dsl数控系统自带的电流环测试功能,可以测试A轴力矩电机电流环的幅频特性和相频特性。
对于电流环幅频特性曲线,要求其幅值沿着0dB(不超过0dB)向右,越平直越好,下降的拐点越靠近1000Hz越好。通过更改电流环P增益Kpi(参数p1715),可以使其沿着0dB线达到尽可能高的频率。
对于电流环相频特性曲线,要求其沿着0º线向右,至 1000Hz左右转向±180º。
下图为电流环优化完成后的幅频曲线和相频曲线。

图8 电流环幅频曲线和相频曲线
2) 速度环和位置环优化
当电流环优化完成后,借助西门子840Dsl数控系统自带的自动伺服优化(AST)功能可以自动完成对A轴力矩电机的速度环和位置环的测量和优化。
对于速度环幅频特性曲线,其幅值响应带宽(也就是幅频曲线上0dB区间)要足够宽,最好能达到100~200Hz,达不到要求的话,至少要保证100Hz的频率带宽,幅值允许少量超调,但要小于3dB。
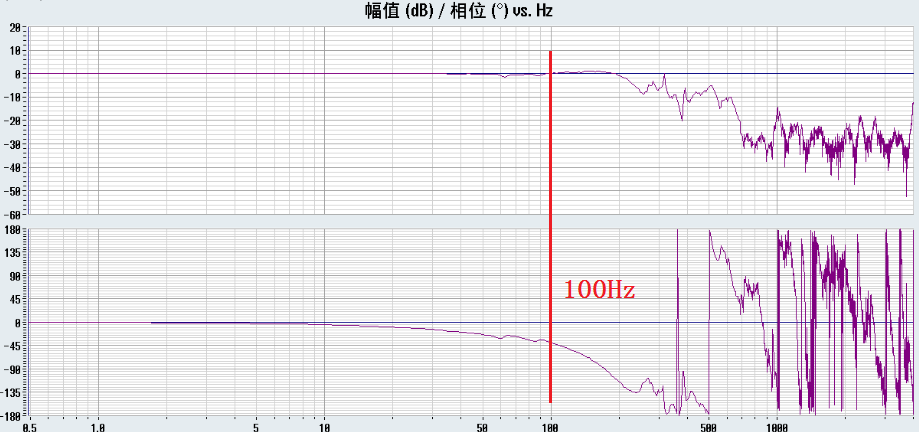
图9 速度环幅频曲线和相频曲线
对于位置环幅频特性曲线,其幅值在整个频率范围内不超过0dB。
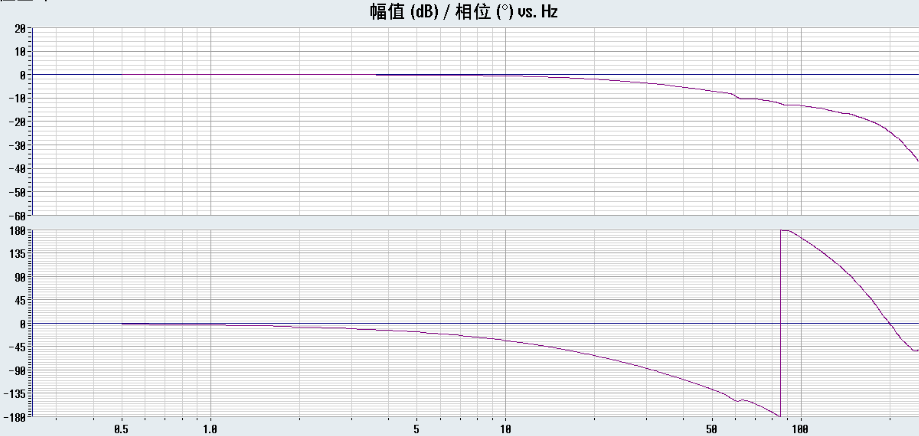
图10 位置环幅频曲线和相频曲线
在实际应用中,A轴中还安装有PTC和PT1000作为温度监控和检测,角度编码器作为速度和位置反馈,在这里就不做介绍了。
七、 结论
通过实践证明,采用一个伺服驱动器连接、驱动A轴的两个力矩电机的方法,在降低电气成本的同时,保障了A轴的同步性。在配置角度编码器后,完全满足高速、高精度定位要求的应用。